Muyang YanI’m a senior in CS at Purdue researching Neuro-symbolic AI for robotics. I’m advised by Prof. Yexiang Xue and Prof. Zak Kingston at Purdue CS, and Prof. Katia Sycara at CMU’s Robotics Institute. I want to build systems that can continually acquire and reason about both explicit and implicit knowledge to act in the real world alongside humans. To this end, I study the use of neuro-symbolic abstractions to enable efficient planning, robust generalization, data-efficient learning, and verifiable behavior in robotic planning. In particular, I aim to develop abstractions that are aware of uncertainty in the real world, including that which arises from human decisions. Outside of research, I love rock climbing, table-tennis, and music production. |

|
Research |
|
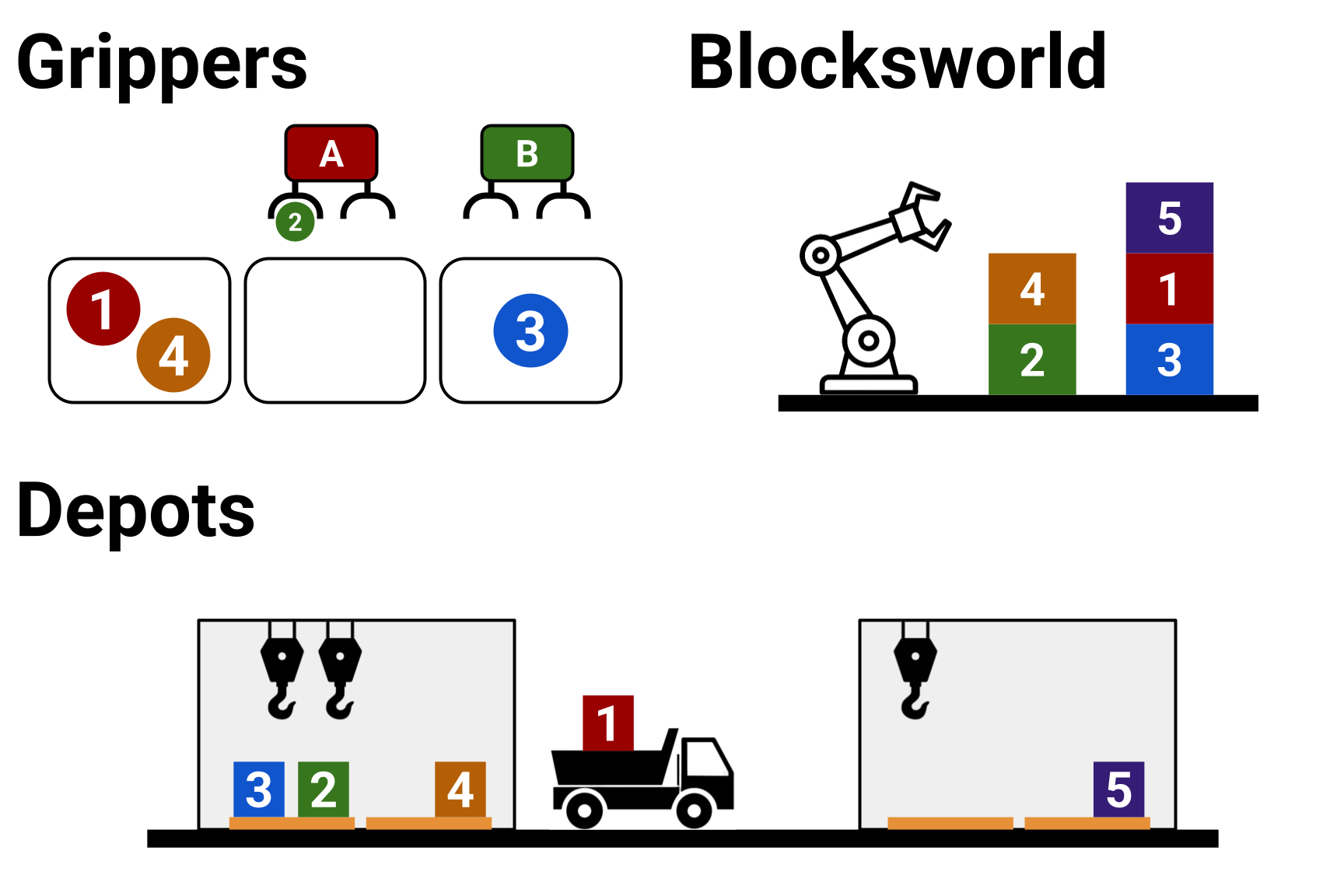
Online Data-Driven Goal Inference with Learned Action SchemasMuyang Yan, Austin Garrett, Maxwell Jacobson, Simon Stepputtis, Katia Sycara, Yexiang Xue, Zachary Kingston IJCAI'26 (Under Review), 2026 Inferring the goals of agents when the underlying domain model is unknown by inferring a posterior over model hypotheses from data. |
|
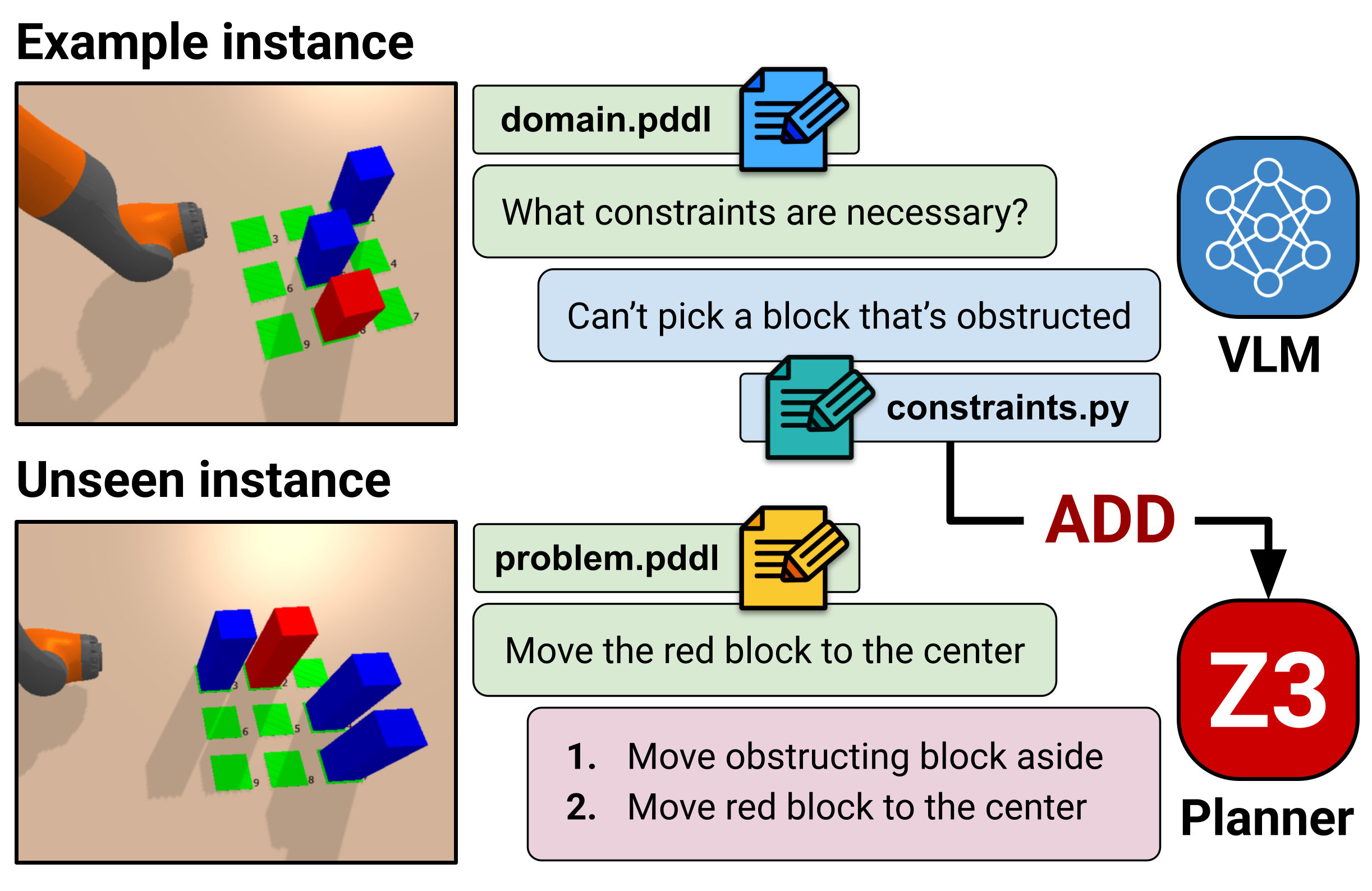
Using VLM Reasoning to Constrain Task and Motion PlanningMuyang Yan, Miras Mengidbayev, Ardon Floros, Weihang Guo, Lydia Kavraki, Zachary Kingston ICRA'25 (Under Review), 2025 Leverage the common-sense spatial reasoning capabilities of VLMs to prevent downward-refinement failures and accelerate planning. |
|
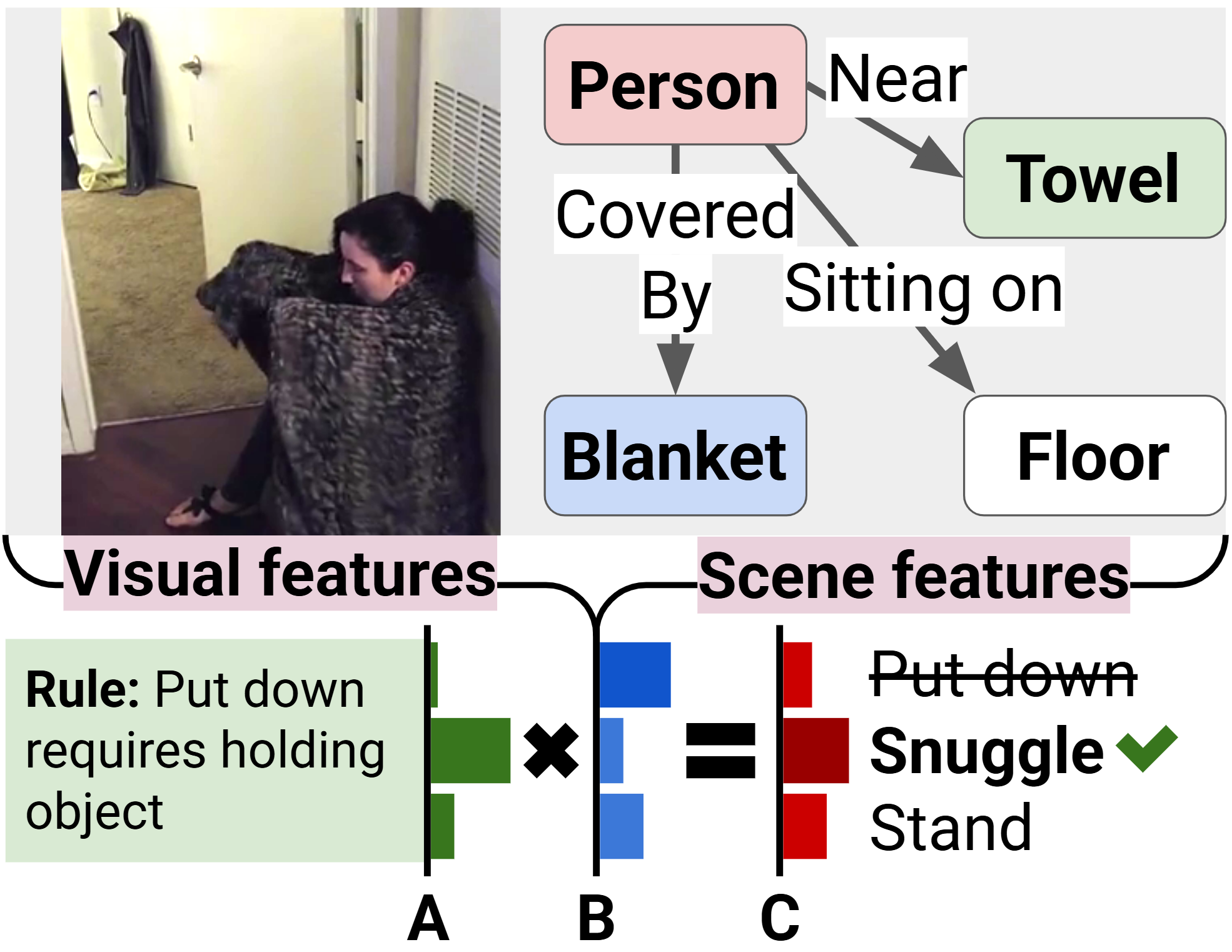
Neuro-Symbolic Action Anticipation from a Single Image with Learned Probabilistic RulesMuyang Yan, Maxwell Jacobson, Nan Jiang, Yaqi Xie, Simon Stepputtis, Katia Sycara, Yexiang Xue AAAI-25 Bridge on Constraint Programming and Machine Learning, 2025 Learning probabilistic action preconditions from data through ILP to anticipate future human actions from single images. |
|
Design and source code from Jon Barron's website |